
主な研究プロジェクト
ロコモティブシンドロームとサルコペニア判別のための
新規な動的バランス指標の開発
ロコモティブシンドロームと
サルコペニア判別のための
新規な動的バランス指標の開発
研究の概要
近年、注目されているロコモティブシンドローム(運動器症候群:通称ロコモ)は移動能力の低下により日常生活機能が障害され、要介護状態または要介護状態のリスクが高まった状態を指します。
ロコモ対策は健康寿命の延伸を図る上で喫緊の課題とされていますが、ロコモ度の判定方法は煩雑である上、「立ち上がりテスト」や「2ステップテスト」では膝関節障害や転倒の危険性が懸念されます。
このため、私たちはより簡便で安全にロコモを判別できるテストが必要と考え、検討を重ねてきました。
この結果、2.66秒間隔で交互に片脚立ちを繰り返す運動課題中の腰部の加速度・角速度データから算出した自己相関係数は動作の安定性を示す“動的バランス能力”のすぐれた指標であり、これを用いてロコモを判別できる可能性が示されました。
これまで、箕面市と泉大津市在住の高齢者300名余りを対象とした調査により、ロコモ度の進行に伴い「交互片脚立ちテスト」で評価した動的バランス能力は有意に低下することが明らかになりました。
しかし、この方法によるロコモの判別精度はまだ実用化レベルには達していないため、研究は道半ばの状況です。
ロコモ度テストの問題点
近年、注目されているロコモティブシンドローム(運動器症候群:通称ロコモ)は加齢に伴い日常生活に必要な移動能力が低下することです。ロコモは健康な状態と要介護状態の中間に位置するとされ、高齢者ではこれを早期に発見し、予防することが健康寿命延伸の面から重要とされています。
しかし、ロコモの判定(ロコモチャレンジ!推進協議会 https://locomo-joa.jp/check/ )には、「立ち上がりテスト」「2ステップテスト」「ロコモ25」の3つのテストを行う必要があり、時間も手間もかかります。
また、「立ち上がりテスト」と「2ステップテスト」は最大努力でテストを行わなければならないため、運動機能の低下した高齢者では関節障害や転倒の危険性が懸念されます。
このため、私たちはより簡便で安全にロコモを判別できるテストが必要と考え、検討を重ねてきました。
動的バランス能力によるロコモ判別の可能性
バランス能力には静的と動的の側面があります。高齢者の体力測定でよく用いられる開眼片足立ちは、静的な動作で重心を安定して保持する『静的バランス能力』のテストです。
これに対して、『動的バランス能力』は歩行・足踏み・立ち上りなどの移動動作でふらつくことなくスムーズに重心移動できる能力であり、高齢者ではファンクショナルリーチテスト(FRT: 前方手伸ばし試験)が評価によく用いられます。
私たちは、過去に地域の高齢者565名の運動機能を1年間追跡調査したことがあります。
結果は、1年間で歩行速度や日常生活動作に関連したアジリティ能力(TUGT)に変化は見られませんでしたが、FRTには男女とも顕著な低下が認められました(図1)。
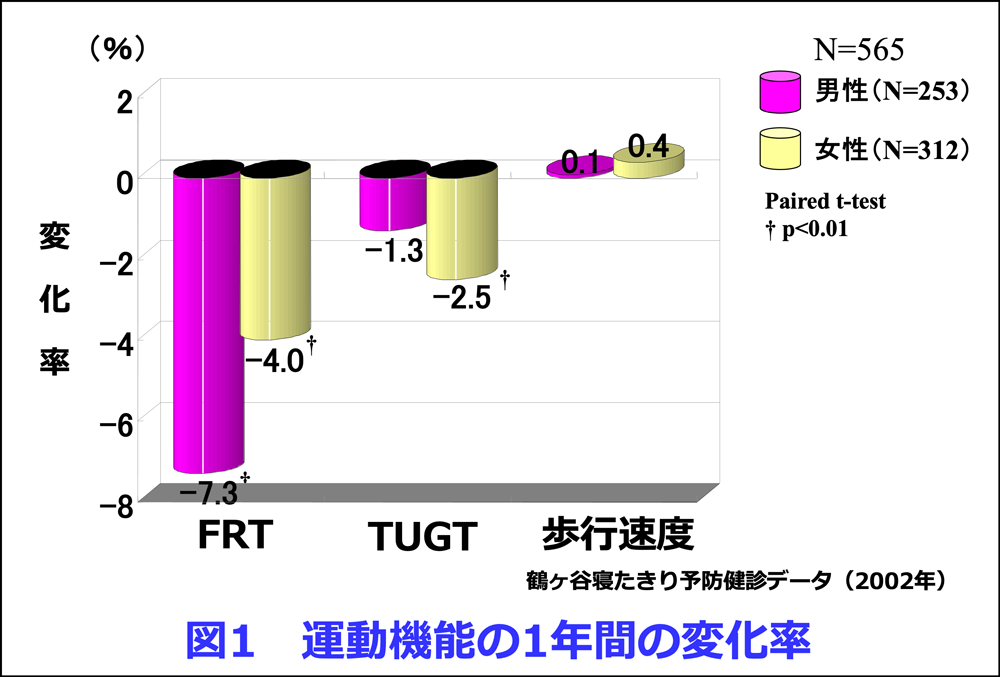
このように、高齢者では移動能力よりも先に動的バランス能力が低下する可能性が示唆されたことから、私たちは動的バランス能力を定量的に測定することにより移動能力障害であるロコモを高精度に予測できるのではないかと考えるようになりました。
また、実際のロコモ度テストにおいても、「立ち上がりテスト」では “片脚起立後に3秒間静止する”、「2ステップテスト」では “3歩目を2歩目のつま先に合わせる” といった動的バランス能力が必要とされます。
これらのことから、私たちは、動的バランス能力は高齢者の移動能力の低下をいち早く捉えることのできるすぐれた指標であると考え、独自の動的バランステストの開発を進めています。
交互片脚立ち動作を用いた動的バランステストの開発
先行研究では、決められたテンポで素早く左右の脚を入れ替える交互片脚立ち動作中の床反力計測から算出した重心移動距離は階段昇降能力の成績と関連することが報告されています。
しかし、床反力計は昔に比べて安価になったとはいえ未だ高額であり、重量も20kg近くあるため、運搬・設置に労力を要します。
また、テスト中は床反力計を正確に踏まなければならないため、本来とは異なる不自然な動作が生じる可能性があります。
そこで、注目したのが3軸加速度センサーです。近年普及の進む3軸加速度センサーは重さ数十グラムでマッチ箱程度の大きさであるため、測定中に動作を制限することはありません。
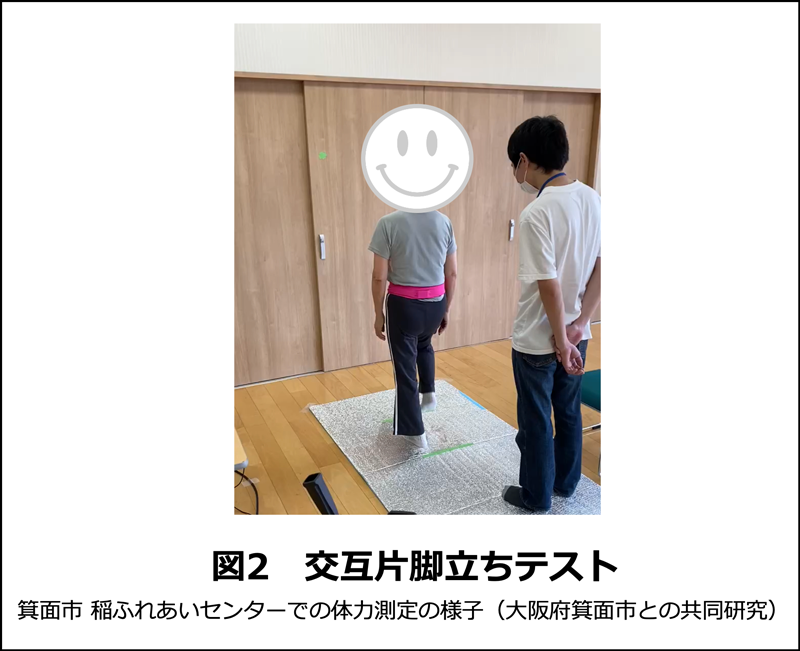
本研究では、腰部に巻いたフリップベルト内に3軸加速度センサーを固定して骨盤の上下・左右・前後方向の加速度と角速度を計測しました(図2)。
交互片脚立ち動作のような一定のリズムで同じ動作を繰り返す運動では、運動中の加速度や角速度は周期性のある波として表出され、波形の一致度を計測することにより動作の安定性を評価できると考えられます。
私たちは、加速度センサーから得られた加速度・角速度波形の一致度を評価するため自己相関係数という指標を用いています。
自己相関係数とは、ある時系列データを数コマずらした時のデータ間の相関であり、そのデータが過去の履歴に対してどれくらいの相関を持つかを示す指標です(図3)。
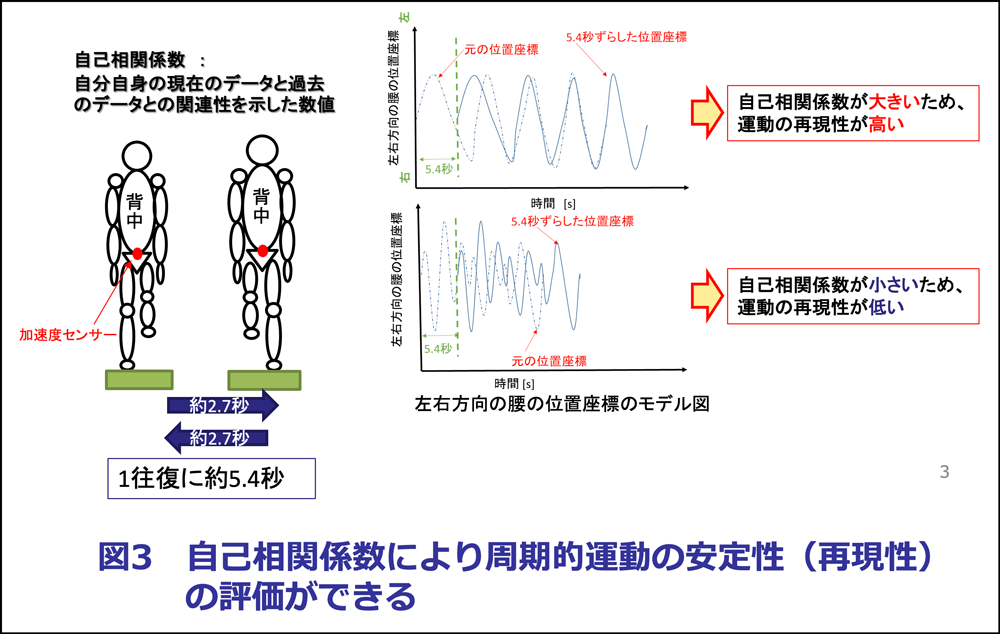
私たちのこれまでの研究では、2.66秒間隔で交互に片脚立ちになる課題、言い換えると、脚を上げてから次に同じ側の脚を上げるまで5.32秒を要する課題では、左右方向の加速度の自己相関係数は、30歳代女性では0.9程度でしたが、70歳代女性では0.7程度となり、顕著な差が認められました(図4)。
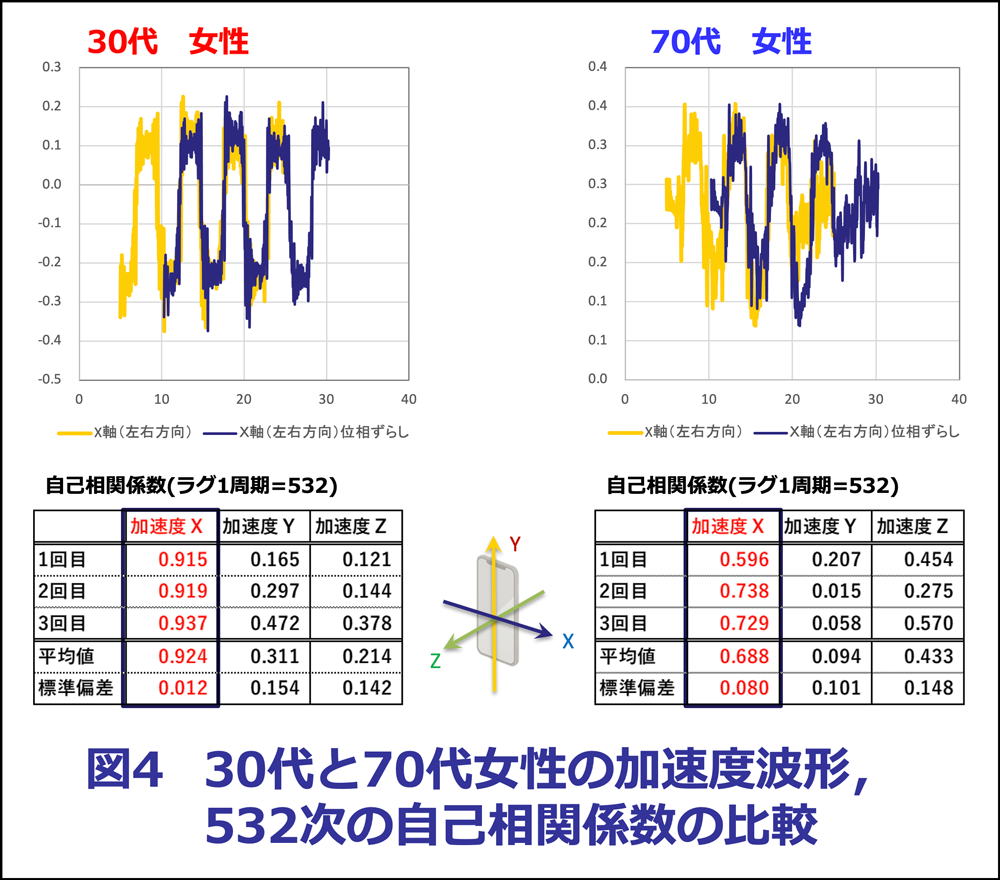
この結果は、70歳代女性では30歳代女性よりも交互片脚立ち動作における骨盤の左右の動揺のばらつきが大きくなる、すなわち、動的バランス能力が低下することを示唆しています。
「腰部加速度データの自己相関係数」を用いたロコモ・サルコペニアの判別式の開発
本研究プロジェクトでは、ロコモやサルコペニアを従来の方法よりも簡便かつ安全に判別する独自の方法を開発することが目的です。
私たちは交互片脚立ち課題における「腰部の加速度・角速度の自己相関係数」が動作の安定性を示す有用な指標と捉え、これによりロコモ・サルコペニアを判別できるのではないかと考え、検討を行っています。予備研究では、自己相関係数を用いた解析方法は、従来のスタンダードとされている周波数解析よりもロコモを判別するすぐれた方法である可能性が示唆されました(IEEJ Transactions on Electrical and Electronic Engineering,2023)。
まだ開発途上ではありますが、従来のロコモ度テストによるロコモ該当の有無を従属変数、交互片脚立ち課題における腰部の3軸加速度・角速度の自己相関係数を独立変数とするロジスティック回帰分析を行ったところ、腰部の前後軸回りと左右軸回りの角速度の自己相関係数が高いほどロコモになる確率が低くなるという回帰式が得られました。
交互片脚立ち動作における腰部の前後軸回りと左右軸回りの角速度は、片脚立ちを行ったときの骨盤の側方傾斜と前後傾斜の速度を示しており、これらの再現性が高いとロコモになりにくいという結果は運動学的・リハビリテーション学的な見地からもきわめて妥当な結果と言えます。
しかし、現時点ではこの回帰式によるロコモの判別性能はまだ十分に高いとはいえない状況であり(ROC下曲線面積:0.7)今後、精度向上に向けてデータの収集と解析をさらに進めていく必要があります。